企业免费推广平台

冀唐智能焊接装备(江苏)有限责任公司焊接机器人|焊接机器人工作站|松下焊机|自动焊接装备
138****7605
为什么需要焊缝跟踪寻位?1、焊接机器人在焊接过程中会出现工件夹偏、热变形等情况,在机器人焊接后进行人工补焊,增加了成本。2、改善焊接工件来料需要花费巨额成本。3、产品多元化且小批量、焊接精度有要求、对焊接工艺人员要求高。为了提高焊接机器人的效率和降低成本,减少示教的时间和难度,地轨式焊接机器人案例,焊缝跟踪寻位的解决方案迫在眉睫。机器人焊缝跟踪寻位系统由两部分组成:焊缝跟踪和焊缝寻位。焊缝跟踪:在焊接位置前安装光学传感器进行数据采集,或通过电源焊接参数采集,地轨式焊接机器人案例,传输到焊接机器人,各种模糊控制算法校正焊接机器人轨迹,地轨式焊接机器人案例,实现自适应控制,实现焊缝实时跟踪。焊缝寻位:一次或多次寻找来定位焊缝的过程,在焊接之前移动焊接机器人或编辑路径程序准确定位焊接接头。实现焊接机器人焊缝跟踪寻位的方法有两种,外设辅助检测和自身检测。外设辅助检测:激光跟踪、照相成像跟踪。通过光学测量设备来进行焊缝相关数据采集,焊接机器人进行数据比对进行自适应手臂运动轨迹调整,达到焊缝实时跟踪。自身检测:焊丝传感检测、焊接参数实时检测。冀唐智能焊接装备(江苏)有限责任公司是一家专业提供焊接机器人 的公司,有想法的不要错过哦!地轨式焊接机器人案例

LAPRISS是松下的高亮度半导体激光机器人焊接系统,由机器人本体、WGⅢ控制器、示教器、激光发生器、激光头和水冷单元等组成。主要特点:1、LAPRISS系统所有部件均由松下提供,兼容性更强。2、松下的高亮度直接半导体激光器,采用美国MIT林肯研究所所开发的波长合成(WBC)技术。体积小、波长短、使用成本低。3、LAPRISS的能量分布为高斯热源分布,在同条件下,熔深要优于其他半导体激光器。4、LAPRISS中心波长为976nm,波长越短,金属的反射率越低,金属对激光的吸收率就越高。对于Al、Mg、Cu、Ag等高反射、高热导率材料而言,增加材料对激光的吸收有利于实现品质焊接。5、松下高亮度直接半导体激光器具有高光电转换效率,能够较大降低生产厂商的使用费用。6、轻量大功率激光扫描头,质量4.5kg,较高焊接速度75m/min。扫描精度≥4μm,500mm长焦距(焦点位置时,激光头距离工件位置为280mm)。7、独特的螺旋工法和旋转工法。8、操作简单易学,松下的激光可以通过机器人控制器对其进行控制,松下机器人控制器可以便捷的控制机器人、激光头以及激光器,增加了设备的可操作性。9、编程简单,九种光斑模式可调,焊接导航功能,只需设定材质、板厚、接头形式等要求就能完成施焊。地轨式焊接机器人案例冀唐智能焊接装备(江苏)有限责任公司为您提供焊接机器人 ,有想法可以来我司咨询!

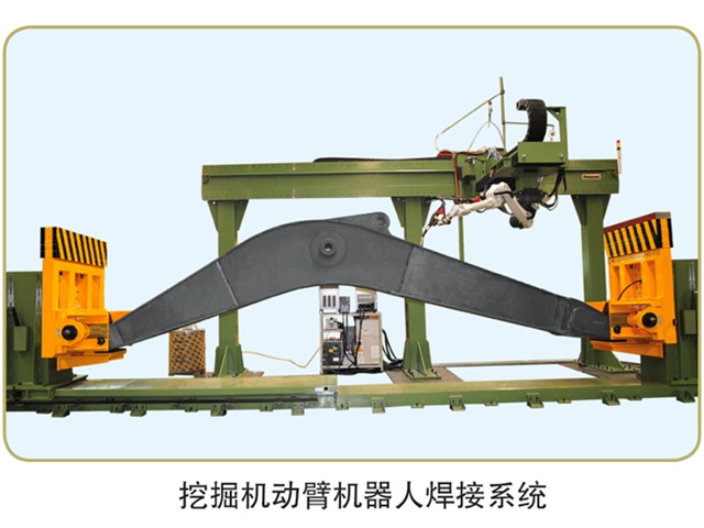
下面介绍一下焊接机器人工作站的构成和原理。焊接机器人工作站包括焊接机器人本体、变位机、轨道行走系统、焊缝自动跟踪技术、翻转台、安全系统等。焊接机器人在焊接过程中,变位机可将焊件自动翻转,有利于实现有效焊接,提高了焊接的自动化水平。焊缝自动跟踪技术可对焊缝智能识别,通过下达指令,对焊缝实现精确焊接,保证焊缝美观且牢固,提高焊接精确度,稳定焊接质量。自动跟踪传感器可对焊接过程多方面监测。包括“焊接前”、“焊接内”、“焊接后”传感器。焊接前传感器位于焊点前追踪焊缝和定位激光束。焊接中传感器使用照相机或二极管检测焊接过程,相机系统能分析锁眼和焊接池,二极管系统能够检测加工光、热辐射或者反射激光的强度。焊接后传感器检查完成的焊点,确定焊点是否符合质量要求。传感器依靠程序化的极限值来区别零件的优劣。焊接机器人工作站设置安全系统,当焊接作业出现误操作或有人员进入工作范围内,焊接机器人紧急停止作业,保护焊接机器人本体不受损失,减少经济损失。以上就是焊接机器人工作站的工作原理,通过焊接机器人搭配焊缝自动跟踪传感器等辅助设备,焊接效果更好,帮助企业提高企业效益。
TM-G3焊接机器人可搭载的机器人本体有TM1400/TM1800/TM2000、WGⅢ控制器和示教器。TM-G3机器人搭载不同焊接电源会有不同工法与作用,可实现多种材料的品质焊接。TM-G3-350GR5/500GR5焊接系统:该系统由TM-G3机器人搭载350GR5/500GR5焊接电源,主要特点:对碳钢具有良好的焊接性能,小电流下可实现轻飞溅短路过渡,标配Root根焊功能,适合打底及大间隙焊接。可扩展Deepen深透弧功能,应用于厚板大熔深穿透焊和厚板打底焊。标准内置IoT模块和模拟通讯接口,可扩展数字接口。主要焊接方法:CO2,MAG。电源型号(下述型号无IoT功能和RFID读卡功能):YD-350GR5HGM、YD-350GR5HVM。松下G5系列焊机,搭载了物联网IoT模块。可通过4G网络随时在线,与松下iWeldCloud焊接云管理系统实时通信。借助IoT模块和iWeldCloud焊接云管理系统,用户可以方便地管理设备,还实现了与唐山松下的互联。G系列焊机把焊接过程中参数上传到云端,从而为用户提供设备故障追踪、设备故障预警、焊接过程分析、焊接参数优化、机器人运行诊断、设备维保支持等服务。松下第五代G系列智能物联网焊机,通过优异的性能和远程云服务,将为用户带来更新的体验和更多的价值!冀唐智能焊接装备(江苏)有限责任公司力于提供焊接机器人 ,期待您的光临!
众所周知,焊接作业环境比较差,对身体有危害,因此员工流动频繁。为了确保企业高效生产需求,焊接机器人能够在恶劣的环境下,保质保量的完成生产任务。工业焊接机器人的优势:1.机器人焊接可以提高生产效率,焊接速度快,不用休息,性能稳定,提高了企业的生产效率。2.机器人焊接可以提高产品质量,采用机器人焊接时,焊接参数都是恒定的,焊缝质量受人的因素影响较小,因此焊接质量是稳定的。从而保证了产品的质量。3.机器人焊接可以降低企业成本,焊接机器人主要体现在规模化生产中,一台机器人可以替代2到4名产业工人。机器人可24小时连续生产,节约企业大量成本。4、快速适应产品更新,机器人与变位机可以通过修改程序以适应不同工件的生产。在产品更新换代时只需要根据更新产品设计相应工装夹具,机器人本体不需要做任何改动,只要更改调用相应的程序命令,就可以做到产品更新,和设备更新。冀唐智能焊接装备(江苏)有限责任公司是一家专业提供焊接机器人 的公司,欢迎新老客户来电!太仓不锈钢焊接机器人设备
冀唐智能焊接装备(江苏)有限责任公司为您提供焊接机器人 。地轨式焊接机器人案例
焊接机器人的焊接变形常见原因:没有选择合理的焊接结构、没有采用合理的焊接工艺、没有使用工装夹具以及操作人员不当等。防止焊接机器人焊接变形的措施:1、合理安排焊缝的位置。焊接焊缝有常规焊缝和复杂焊缝,常规焊缝可进行简单的夹紧处理,焊接机器人焊丝可以进行自动识别焊接,针对复杂的焊缝可选择使用变位机,将焊缝位置回转成船缝和平缝的位置,焊缝不宜过于集中,尽可能减少焊缝数量和焊缝长度,在保证结构强度的前提下,选择较小的焊缝尺寸。2、在装配工件的过程中采用辅助设备。可以搭配工装夹具夹紧工件,预留焊缝的收缩余量,当工装夹具处于夹紧状态时,具备自锁的功能,将工件进行夹紧,在翻转的过程中确保工件不脱落。先焊短焊缝,再焊长焊缝。3、采取合理的焊接工艺措施。根据工件的材质以及结构不同,选择合理的焊接方法, 常见的焊接方法包括氩弧焊、激光焊、埋弧焊、气保焊等,选择合理的焊接方法有利于减少工件变形。4、提高操作人员的技能水平。操作人员在操作之前需要经过技能培训,在操作中能够根据问题找出原因并进行解决,对焊接机器人的结构进行了解,按照操作流程进行,减少由于人工操作出现的变形。地轨式焊接机器人案例
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
冀唐智能焊接装备(江苏)有限责任公司 Copyright © 商名网营销建站平台 All Rights Reserved.